-
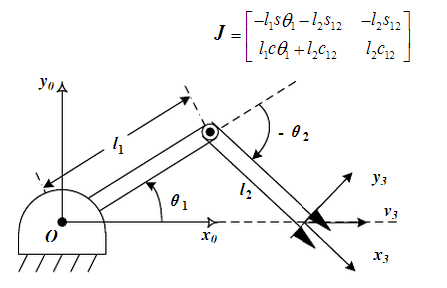
题目: 问答题如图所示的两自由度机械手,手部沿固定坐标系在手上X0轴正向以1.0m/s的速度移动,杆长l1=l2=0.5m。设在某时刻θ1=30°,θ2=-60°,求该时刻的关节速度。已知两自由度机械手速度雅可比矩阵为
答案不对?请尝试站内搜索
推荐知识点:
- 以下可喻“能担当大事,不怕艰危”的坚强人物的是:()
- 某厂#1机组(600MW)2008年1月10日9:30因非计划降低出力30MW,持续10小时,其余时间全出力运行。#2机组(600MW)全出力运行。该厂当月等效非计划降低出力时间是()小时。
- 2015年中央农村工作会议指出,进一步深化农村改革,完善顶层设计,抓好试点实验,确保改有所进,改有所成。材料体现的矛盾观点是()
- 患者感到胸痛、胸闷、气短、心慌、呼吸不畅,应考虑的是().
- 具有较长的保护间隔的突发脉冲序列是()。
- 凯米和狄佛瑞斯对发生在规则游戏中的动作进行了归类,并以此为根据把游戏分为()类。
- 资源共享、共驻共建是社区自治的关键。
- 在办公室适度性骚扰是可以容忍、接受的,过于疾言厉色会让旁人觉得小题大做。()
- 徇私舞弊不移交刑事案件罪的主体是()。
- 下列属于丝虫病慢性期的表现是( )