-
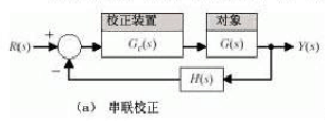
题目: 未知类型NASA将使用机器人来建造永久性月球站。机器人手爪的位置控制系统如下图所示,其中
 ,试设计一个滞后校正网络Gc(s),使系统的相角裕度达到45°。()
,试设计一个滞后校正网络Gc(s),使系统的相角裕度达到45°。()
A.Gc(s)=(1-20s)/(1-106s)
B.Gc(s)=(10+20s)/(1+106s)
C.Gc(s)=(10-20s)/(1+106s)
D.Gc(s)=(1+20s)/(1+106s)
答案不对?请尝试站内搜索
推荐知识点:
- 装有过卷扬限制器、过负荷限制器、行程限制器以及起重臂俯仰限制器等的各式起重机,在工作时,指挥人员必须在其限制范围以内进行工作,()利用这些安全装置来代替正规操作动作,但属于自动化操作范围以内的安全装置除外。
- 某童装厂拥有80人从事童装生产经营活动,根据《安全生产法》的规定,该厂()。
- 以下哪几项属于易耗品()
- 密蒙花药用部位是()
- 将软弱下卧层的承载力标准值修正为设计值时( )。
- 下面选项中,属于不需要工作分析确定的工作说明书的内容是()。
- 3,5B.r2-PA.DA.T分光光度法测定水中银含量时,水样中相对于银含量100倍的铁、400倍的铜对测定银均无干扰。
- 再生床层温度降低时,再生剂含碳量下降。
- 关于纵向弛豫的叙述正确的是()
- 书法对象的艺术性表现不包括().